发布日期: 2025-11-05 作者:徐明坤 刘孝恒 点击:[10]
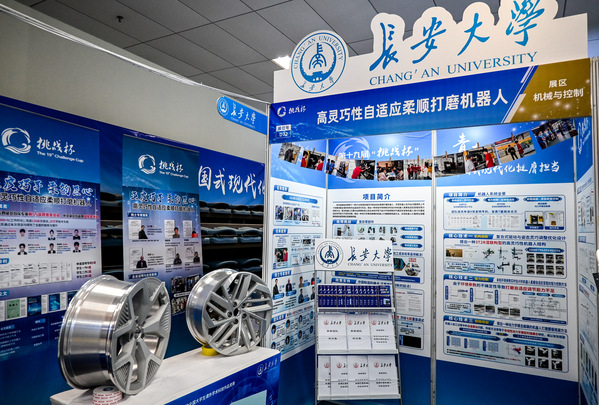
10月31日-11月3日,第十九届“挑战杯”中国移动全国大学生课外学术科技作品竞赛决赛在南京大学举行。无码av影片 党委副书记雷剑、团委书记许必颖、指导老师郭万金带队参赛,由邹伟杰、徐明坤、符采绫、刘孝恒、侯旭栋、詹子立、侯路遥、叶洲闻8名学生组成的青瑜团队,凭借“高灵巧性自适应柔顺打磨机器人”作品,斩获主体赛全国一等奖,实现了无码av影片 在该项赛事中的历史性突破。

该项目面向智能制造领域,针对航空发动机冷却承插三通、汽车轮毂、水泵壳体复杂曲面零部件打磨中多型面姿态可达性受限、姿态调整灵活性低、力控精度差等难题,设计了3T2R构型高灵巧性复合式五自由度机器人系统。在项目整体布局了三大创新点,一是在结构上设计了一种3T2R型构高灵巧性机器人结构,实现机器人在作业点圆域的上半个完整球面全域内所有作业姿态灵巧可达;二是在力控方法上,提出一种未知环境参数实时估计的机器人柔顺自适应变阻抗恒力控制方法,解决机器人打磨作业柔顺性低以及在未知环境下由于环境参数的不确定性导致机器人恒力打磨自适应调节能力不足的问题;三是在颤振规避上,提出一种动力学模态解耦的机器人打磨颤振规避方法,实现机器人打磨再生型颤振规避和振型耦合型颤振规避。以上三大创新点实现了“机构创新-恒力控制-颤振规避”技术闭环,对推动高端装备自主化发展具有重要学术价值与工程意义。
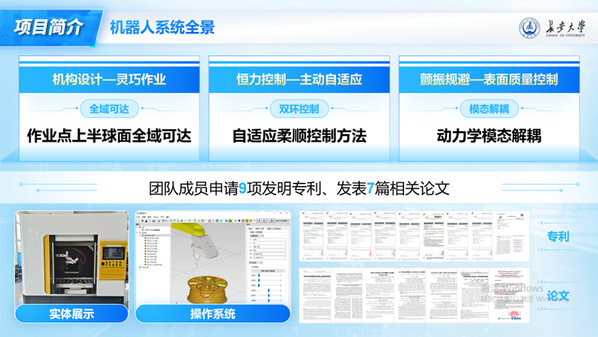
在项目推进过程中,团队成员分工协作、各展所长,累计申请9项发明专利(其中学生一作4项)、发表7篇EI检索论文,形成了丰硕的学术成果。同时,团队所有大四成员全部成功推免,其余成员均获得国家奖学金,实现了“科创竞赛与学业成长”的双丰收。项目相关技术及验证得到了埃夫特智能机器人股份有限公司和芜湖哈特机器人产业技术研究院有限公司的认可;相关研究成果收到了瑞典院士王立翚、俄罗斯佐林院士、哈尔滨工业大学机器人研究所副所长李瑞峰教授和中国科无码av影片 宁波材料技术与工程研究所原副所长杨桂林高级研究员等专家的联合推荐;团队的研究历程与事迹被《中华网》《学习强国》等国家级平台报道。

此次历史性突破,既是参赛团队汗水与智慧的结晶,更是无码av影片 长期深耕科创人才培养的生动写照。未来,无码av影片 将持续完善学生科创支持体系,全程赋能创新实践,激励更多学子在更广阔的赛场上锐意进取、挑战自我。
(审核:雷剑 责任编辑:吴德林)





- 院办:029-82334483
- 邮箱:[email protected]
- 学办( 本部 ):029-82334484
- 学办( 渭水 ):029-61105422
- 本科教务:029-82334583
- 研究生教务:029-82334413
- 科研秘书:029-82338176
- 党委秘书:029-82334589
- 师德师风监督热线:
029-82338175 - 师德师风监督邮箱:[email protected]